Presenter: Yaguang Zhang
Affiliation(s): Purdue
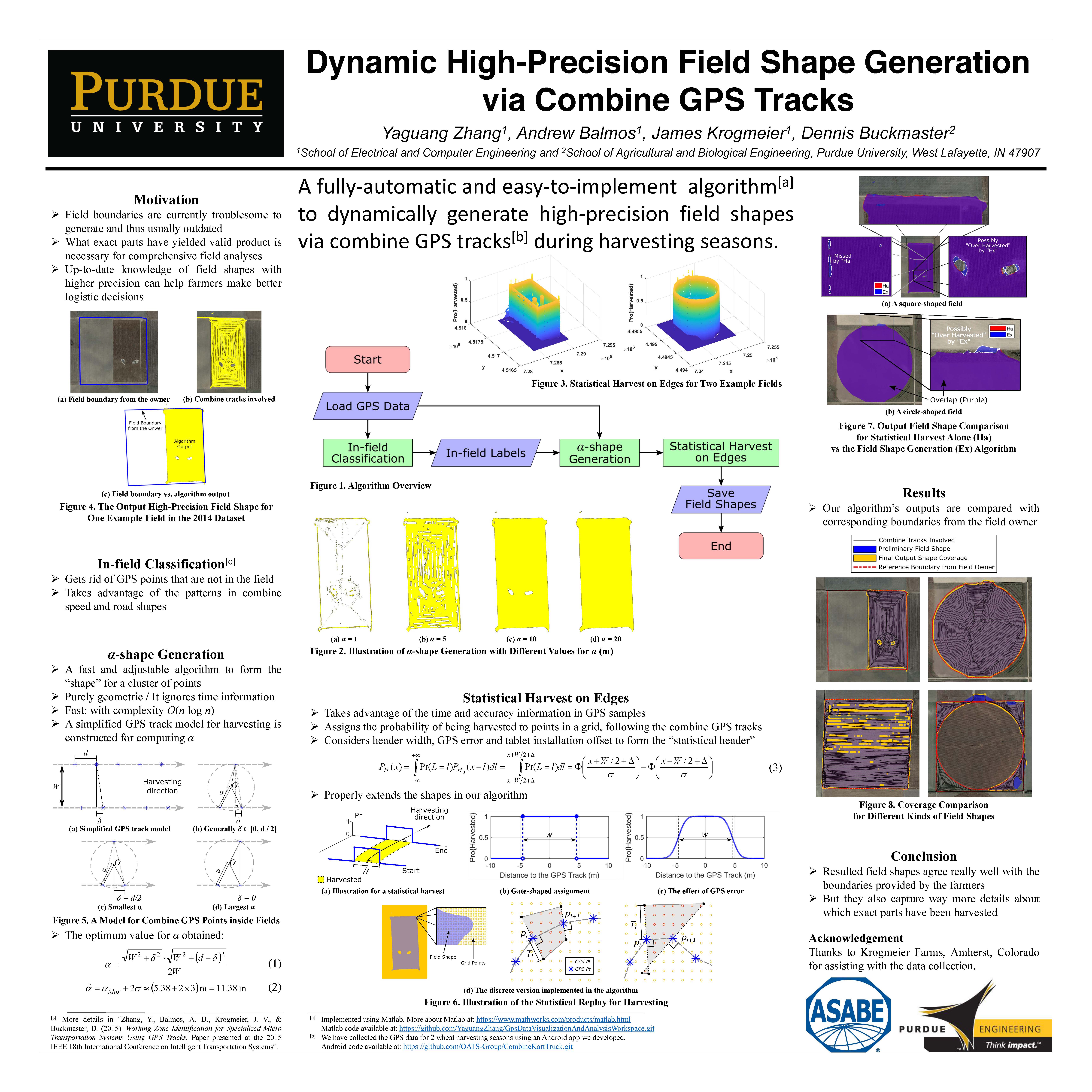
Poster Title: Dynamic High-Precision Field Shape Generation via Combine GPS Tracks
Authors: Yaguang Zhang, Andrew Balmos, James Krogmeier, Dennis Buckmaster
Abstract:
Fields are in practice the most fundamental elements for agricultural management. Crops within the same field are usually not only treated similarly as a group during planting, growing and harvesting, they are also often analyzed together to represent the performance of that particular field. Currently, fields are often defined as areas inside some static field boundaries previously decided by the operator. However, the shape for the actual area in a field which yields valid products may change dramatically over time because of weather, natural terrain changes, in-field constructions and field management decisions. And the current static approach to defining fields makes it hard for comprehensive high-precision performance evaluation. In this paper, we propose to utilize GPS tracks for combine harvesters during the harvesting season to extract up-to-date, high-precision field shapes. We use the notion of α-shape to outline the fields and detect holes inside them. After that, another technique, statistical replay for harvesting, is used to reasonably extend the field shapes. The whole algorithm is fully automatic and the field boundaries generated by it agree with the ones provided by the field owners, but capture far more details, like holes, which are parts not suitable for farming, inside the fields. We also looked at some possible application cases for our algorithm. Results for the same fields in different years are compared, and the differences we see in fact reflect several important decisions made by the farmers.
Click to view full PDF:
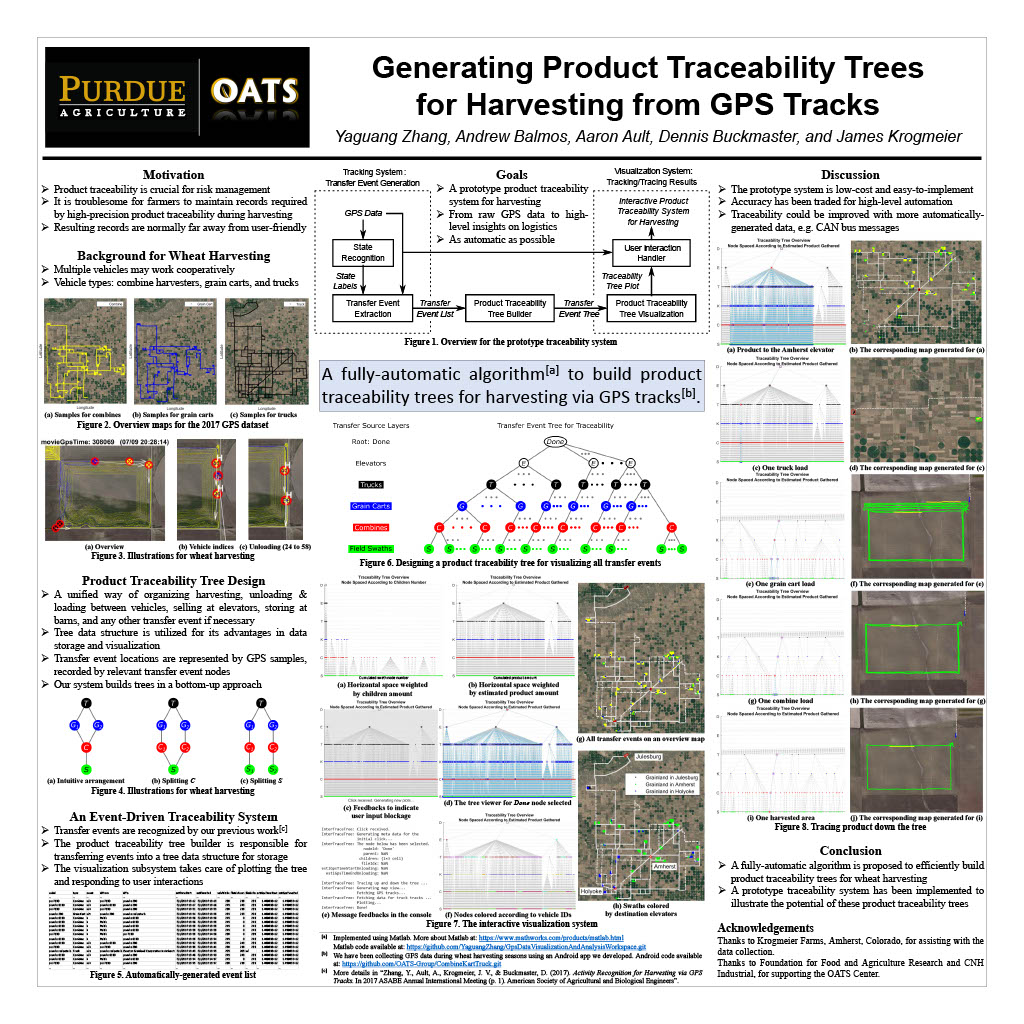
Poster Title: Generating Product Traceability Trees for Harvesting from GPS Tracks
Authors: Yaguang Zhang, Andrew Balmos, Aaron Ault, Dennis Buckmaster, James Krogmeier
Abstract: With increasing concerns about food safety worldwide in many countries, product traceability has become an irreplaceable risk-management tool. It enables the identification of possible sources for defective goods, and furthermore, the withdraw or recall of affected products to protect consumers from foodborne diseases. However, it is troublesome for farmers to maintain records required by high-precision product traceability during harvesting, because traditional traceability systems usually involve human labor in paper work or extra expenses on electronic equipment purchase and installation, and either way the resulting records are normally far away from user-friendly. In this work, a fully-automatic algorithm is proposed for efficiently generating product traceability trees to visualize and store the full transportation record of wheat from fields to elevators. Extending previous works of harvesting activity recognition via GPS tracks, this algorithm demonstrates great potential of tracing product using only GPS logs for vehicles involved in the harvesting. From the output trees, product yielded at any point of the field can be tracked all the way to the elevator where it was sold/stored, by starting from the corresponding leaf and walking all the way to the root of its tree. Furthermore, each truckload of product unloaded together at any destination elevator can be traced back to areas where the corresponding product was harvested, by following the corresponding tree in the opposite direction. In this way, the traceability records can be not only clearly visualized for farmers but also easily utilized by other algorithms.
Click to view full PDF:
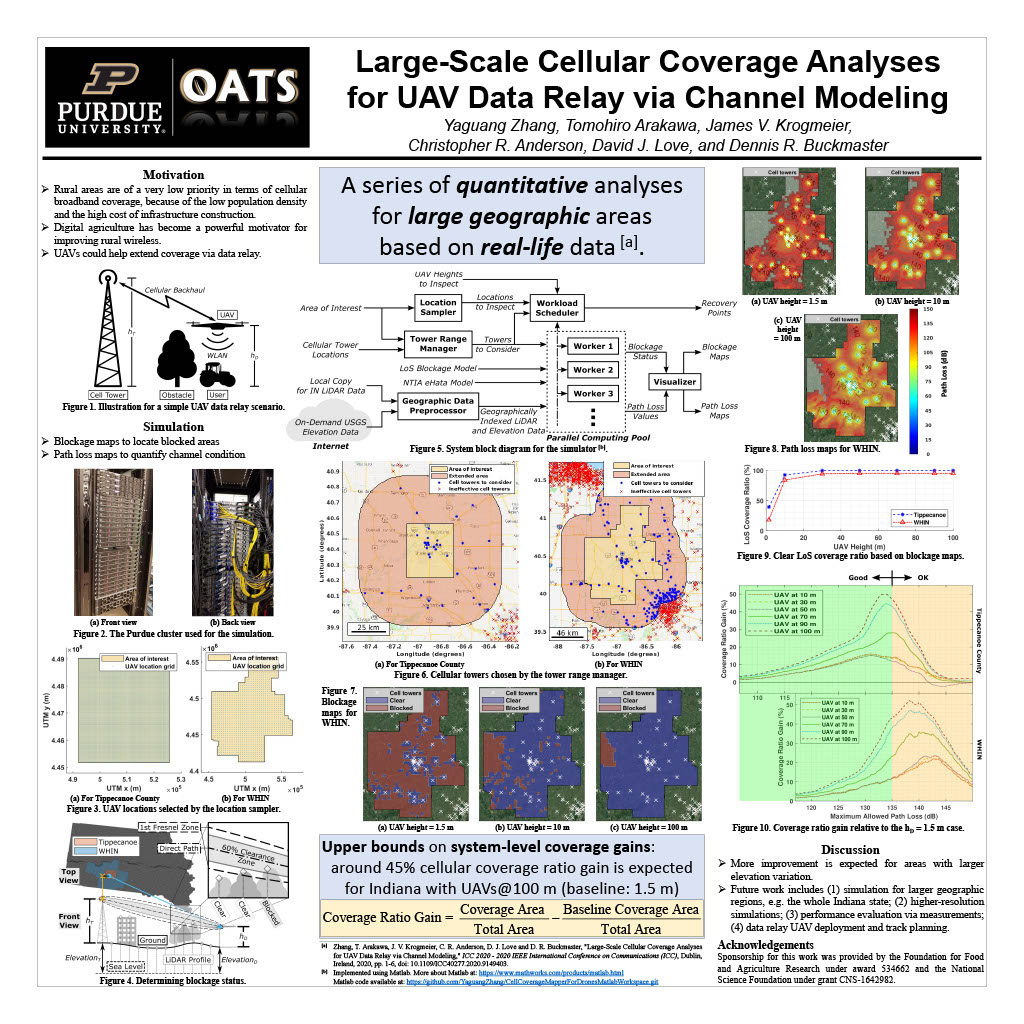
Poster Title: Large-Scale Cellular Coverage Analyses for UAV Data Relay via Channel Modeling
Authors: Yaguang Zhang, Tomohiro Arakawa, James V. Krogmeier, Christopher R. Anderson, David J. Love, and Dennis R. Buckmaster
Abstract: With the rapid popularity of unmanned aerial vehicles (UAVs, also known as drones), UAV data relay has demonstrated potential extending wireless communication coverage, especially for rural areas. The flexibility of this approach has attracted research attention from a variety of areas, including Internet of Things, intelligent transportation systems, and digital agriculture. However, most current research effort focuses on modeling and theoretically optimizing data relay systems via UAV trajectories in simplified geographic environments, while taking advantage of UAVs for practical wireless communication networks requires large-scale quantitative performance analysis results based on real-life environment information. In this work, we propose algorithms for generating large-scale blockage and path loss maps via terrain-based channel modeling for cellular communication systems with fixed-height relay drones. Our analyses reveal the coverage ratios for Tippecanoe County and the Wabash Heartland Innovation Network region in Indiana, with relay drones simulated at different heights. A coverage ratio gain over 40% can be achieved at a drone height of 100 m, compared to a typical pedestrian height of 1.5 m. These site-specific analyses are important in locating poorly covered spots and quantifying the coverage improvement from UAV data relay.
Click to view full PDF: